publications
My publications in reversed chronological order.
2026
- Jaw Exoskeletons
 Design and Modeling of a Novel Active Hybrid Exoskeleton for Jaw Motion AssistancePaul-Otto Müller and Oskar von StrykIn 2026 IEEE RAS/EMBS 11th International Conference on Biomedical Robotics and Biomechatronics (BioRob), Edmonton, Canada, Aug 2026Preprint, submitted
Design and Modeling of a Novel Active Hybrid Exoskeleton for Jaw Motion AssistancePaul-Otto Müller and Oskar von StrykIn 2026 IEEE RAS/EMBS 11th International Conference on Biomedical Robotics and Biomechatronics (BioRob), Edmonton, Canada, Aug 2026Preprint, submittedTemporomandibular disorders substantially affect and impair jaw functions and thus the quality of life. Yet, powered assistance for jaw rehabilitation remains widely unexplored despite advances in exoskeletons for other extremities. To the best of our knowledge, this work presents the first comprehensive computational framework for hybrid rigid-soft jaw exoskeletons, integrating a biomechanically validated 24-muscle jaw model with deformable finite element soft-body dynamics in MuJoCo. The proposed four-tendon system combines a rigid chin cup for force transmission with a compliant facial mask for user comfort. Simulation-based evaluation under six configurations (TPU/Silicone materials, muscles-only/tendons-only/combined actuation) demonstrates effective trajectory tracking with mean errors of 4.60-6.42 mm while maintaining safe interface pressures and material stresses. Critical findings reveal fundamental performance-comfort trade-offs: TPU enables efficient force transmission with lower mean strain (11.49 % vs 14.06 %) but higher mean pressure (12.02 kPa vs 9.89 kPa) than silicone. Mean tendon forces of 24.63-35.46 N in tendons-only mode achieve effective assistance, yet combined actuation paradoxically increases biological muscle loading by 6-10 % despite improved tracking, guiding future control strategies toward biomechanical- and metabolically-aware algorithms. This validated open-source computational framework establishes essential safety constraints and design prerequisites for physical prototyping, providing a systematic path toward safe, wearable robot-assisted therapy for temporomandibular disorders.
@inproceedings{Mueller2026b, author = {Müller, Paul-Otto and {von Stryk}, Oskar}, booktitle = {2026 IEEE RAS/EMBS 11th International Conference on Biomedical Robotics and Biomechatronics (BioRob), Edmonton, Canada}, title = {Design and Modeling of a Novel Active Hybrid Exoskeleton for Jaw Motion Assistance}, year = {2026}, month = aug, note = {Preprint, submitted}, publisher = {TUprints, Darmstadt}, doi = {10.26083/tuda-7809}, } - Jaw Exoskeletons
 A Novel Powered Jaw Exoskeleton to Treat Temporomandibular Disorders: Design and Control ChallengesPaul-Otto Müller and Oskar von StrykIn 2nd German Robotics Conference (GRC) 2026, Cologne, Germany, Mar 2026
A Novel Powered Jaw Exoskeleton to Treat Temporomandibular Disorders: Design and Control ChallengesPaul-Otto Müller and Oskar von StrykIn 2nd German Robotics Conference (GRC) 2026, Cologne, Germany, Mar 2026Temporomandibular disorders severely impair masticatory function and quality of life. While powered jaw exoskeletons offer potential for rehabilitation, they are not well researched and face challenges related to complex biomechanics and safe force transmission. This paper presents a novel hybrid active jaw exoskeleton design that addresses these issues by combining a rigid chin mechanism for precise force application with a compliant facial interface for enhanced safety. We develop a high-fidelity MuJoCo simulation and outline a control concept to handle partial observability and soft dynamics. This integrates a learned, deformation-aware dynamics model with latent states into a constrained, differentiable model predictive control scheme tuned via RL. This work establishes a foundation for future safe, wearable robot-assisted therapy for temporomandibular disorders.
@inproceedings{Mueller2026a, author = {Müller, Paul-Otto and {von Stryk}, Oskar}, booktitle = {2nd German Robotics Conference (GRC) 2026, Cologne, Germany}, title = {A Novel Powered Jaw Exoskeleton to Treat Temporomandibular Disorders: Design and Control Challenges}, year = {2026}, month = mar, publisher = {RIG}, }
2025
- Motion Tracking
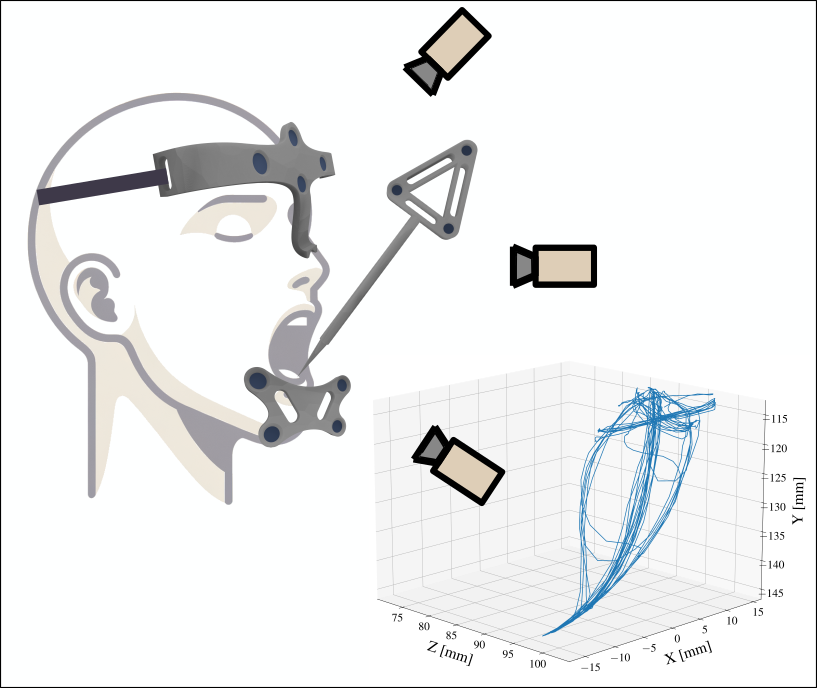 An Optical Measurement System for Open-Source Tracking of Jaw MotionsIn 2025 IEEE Sensors, Vancouver, Canada, Oct 2025
An Optical Measurement System for Open-Source Tracking of Jaw MotionsIn 2025 IEEE Sensors, Vancouver, Canada, Oct 2025Precise tracking of the jaw kinematics is crucial for diagnosing various musculoskeletal and neuromuscular diseases affecting the masticatory system and for advancing rehabilitative devices such as jaw exoskeletons, a hardly explored research field, to treat these disorders. We introduce an open-source, low-cost, precise, non-invasive, and biocompatible jaw tracking system based on optical motion capture technology to address the need for accessible and adaptable research tools. The system encompasses a complete pipeline from data acquisition, processing, and kinematic analysis to filtering, visualization, and data storage. We evaluated its performance and feasibility in experiments with four participants executing various jaw movements. The system demonstrated reliable kinematic tracking with an estimated precision of (182 ± 47) μm and (0.126 ± 0.034) °. Therefore, the open-source nature of the system and its utility comparable to commercial systems make it suitable for many research and development contexts, especially for applications such as the integration and design of jaw exoskeletons and customized diagnostic protocols. The complete system is available at GitHub with the aim of promoting innovation in temporomandibular disorders research and jaw assistive technology.
@inproceedings{Mueller2025e, author = {Müller, Paul-Otto and Suppelt, Sven and Kupnik, Mario and {von Stryk}, Oskar}, booktitle = {2025 IEEE Sensors, Vancouver, Canada}, title = {An Optical Measurement System for Open-Source Tracking of Jaw Motions}, year = {2025}, month = oct, publisher = {IEEE}, doi = {10.1109/SENSORS59705.2025.11330651}, } - Jaw Exoskeletons
 A Jaw Model Framework for the Development of an Exoskeleton to Treat Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn The XXX Congress of the International Society of Biomechanics (ISB), Stockholm, Sweden, Jul 2025
A Jaw Model Framework for the Development of an Exoskeleton to Treat Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn The XXX Congress of the International Society of Biomechanics (ISB), Stockholm, Sweden, Jul 2025Exoskeletons might provide an intriguing and effective opportunity to enhance and support the rehabilitation of temporomandibular disorders (TMDs) affecting the masticatory system. Three extendable and customizable jaw model variants, including a new approach to modeling the temporomandibular joints (TMJs), are presented to create the research basis and facilitate the design and prototyping of such a device. The code of the framework is publicly available on GitHub (https://github.com/paulotto/exosim).
@inproceedings{Mueller2025d, author = {Müller, Paul-Otto and {von Stryk}, Oskar}, title = {A Jaw Model Framework for the Development of an Exoskeleton to Treat Temporomandibular Disorders}, booktitle = {The XXX Congress of the International Society of Biomechanics (ISB), Stockholm, Sweden}, year = {2025}, month = jul, publisher = {}, } - Jaw Exoskeletons
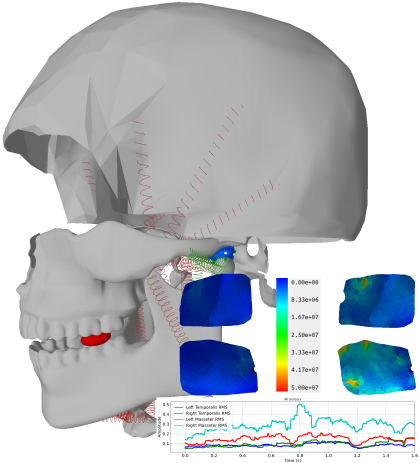 On the Importance of Muscle Activity for an Exoskeleton to Rehabilitate Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn The 12th International Symposium on Adaptive Motion of Animals and Machines and 2nd LokoAssist Symposium (AMAM / LokoAssist Symposium), Darmstadt, Germany, Jul 2025
On the Importance of Muscle Activity for an Exoskeleton to Rehabilitate Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn The 12th International Symposium on Adaptive Motion of Animals and Machines and 2nd LokoAssist Symposium (AMAM / LokoAssist Symposium), Darmstadt, Germany, Jul 2025Temporomandibular disorders affect the temporomandibular joints, leading to pain and dysfunction in essential activities like speaking and chewing. This work explores the role of muscle activity in rehabilitating temporomandibular disorders using jaw exoskeletons, a topic relatively underexplored in the literature. A virtual jaw model incorporating finite element analysis and electromyography data is used to study muscle activity, teeth loads, and temporomandibular joint discs’ stresses under three simulation scenarios. Results indicate that muscle activity strongly correlates with forces and stresses, providing critical insights not captured by position or force measurements alone. Integrating electromyography sensors into jaw exoskeletons is proposed as an additional safety measure alongside pose or force/torque sensors to prevent strain and enable adaptive control, advancing the development of bioinspired temporomandibular disorder rehabilitation technologies.
@inproceedings{Mueller2025c, author = {Müller, Paul-Otto and {von Stryk}, Oskar}, title = {On the Importance of Muscle Activity for an Exoskeleton to Rehabilitate Temporomandibular Disorders}, booktitle = {The 12th International Symposium on Adaptive Motion of Animals and Machines and 2nd LokoAssist Symposium (AMAM / LokoAssist Symposium), Darmstadt, Germany}, year = {2025}, month = jul, doi = {10.26083/tuprints-00030973}, publisher = {TUprints, Darmstadt}, } - Jaw Exoskeletons
 Exoskeletons for the rehabilitation of temporomandibular disorders: a comprehensive reviewPaul-Otto Müller, Robert Sader, and Oskar von StrykFrontiers in Robotics and AI, May 2025
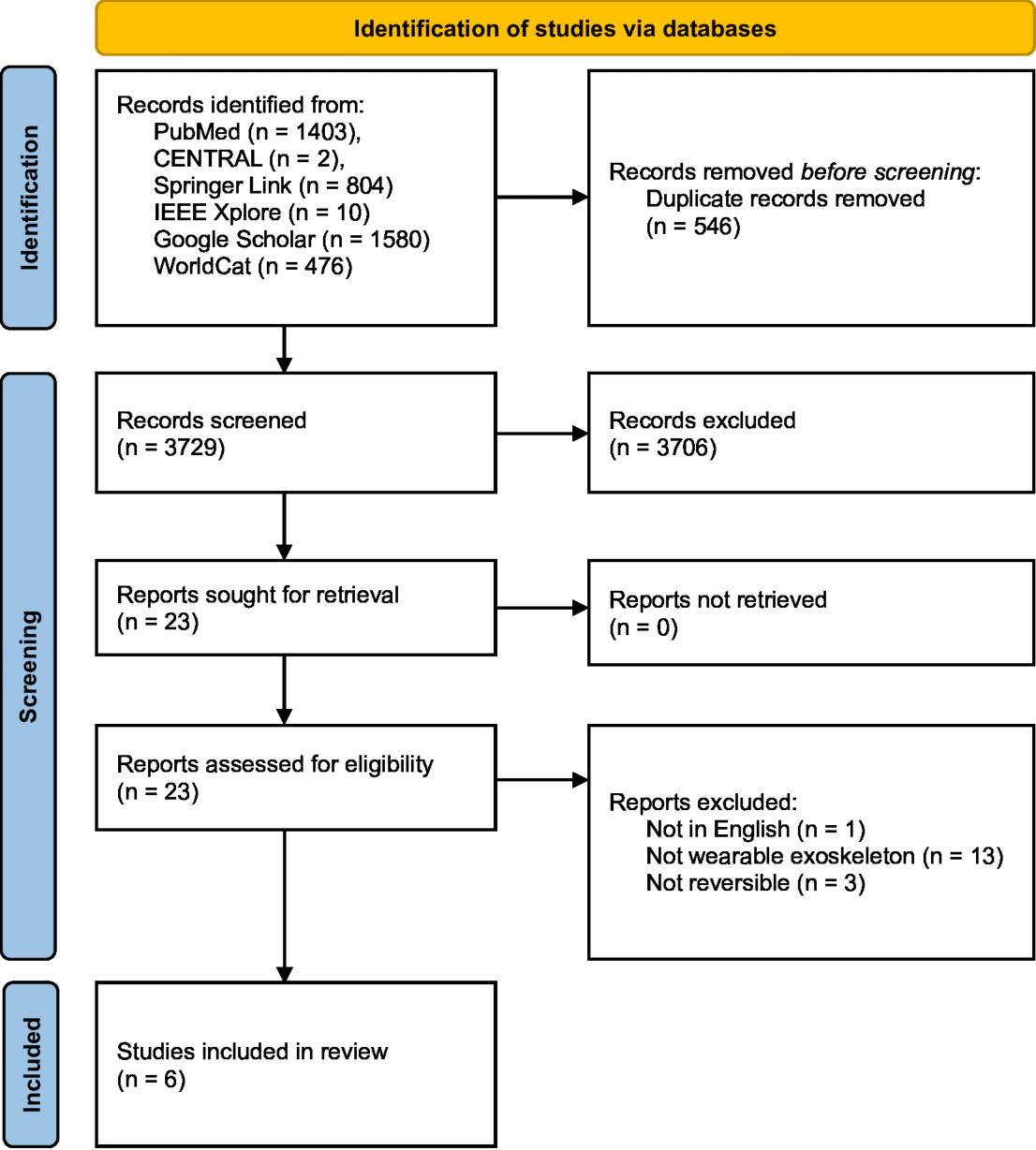
Exoskeletons for the rehabilitation of temporomandibular disorders: a comprehensive reviewPaul-Otto Müller, Robert Sader, and Oskar von StrykFrontiers in Robotics and AI, May 2025Despite the many technological advancements in exoskeletons for the rehabilitation of lower or upper limbs, there has been limited exploration of their application in treating temporomandibular disorders, a set of musculoskeletal and neuromuscular conditions affecting the masticatory system. By collecting data, implementing assisting and resisting training routines, and encouraging active patient engagement, exoskeletons could provide controlled and individualized exercise with flexibility in time and location to aid in the recovery or improvement of jaw mobility and function. Thus, they might offer a valuable alternative or complement to conservative physiotherapy. In this context, the review aims to draw attention to rehabilitating temporomandibular disorders with the help of exoskeletons by looking at the advantages and opportunities these devices potentially provide. After stating the requirements and resulting scientific challenges in various fields and discussing the state of the art, existing research gaps and deficiencies will be discussed, highlighting areas where further research and development is needed.
@article{Mueller2025b, author = {Müller, Paul-Otto and Sader, Robert and {von Stryk}, Oskar}, title = {Exoskeletons for the rehabilitation of temporomandibular disorders: a comprehensive review}, journal = {Frontiers in Robotics and AI}, year = {2025}, volume = {12}, month = may, issn = {2296-9144}, doi = {10.3389/frobt.2025.1492275}, publisher = {Frontiers Media SA}, } - Jaw Exoskeletons
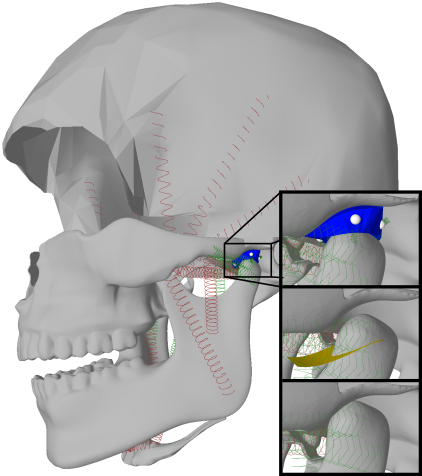
 The Foundation for Developing an Exoskeleton for the Rehabilitation of Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn 2025 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), Palermo, Italy, Apr 2025
The Foundation for Developing an Exoskeleton for the Rehabilitation of Temporomandibular DisordersPaul-Otto Müller and Oskar von StrykIn 2025 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), Palermo, Italy, Apr 2025Temporomandibular disorders affect a significant portion of the population, often causing pain and restricted jaw movement. Physiotherapy with active jaw exoskeletons seems to be a promising treatment approach. However, there has been limited progress in this area, with only a few studies published. The lack of detailed simulations and biomechanical jaw models in these papers impedes the design and validation of such devices. Thus, this work presents an open-source and extendable jaw model framework to support the development of jaw exoskeletons for TMD rehabilitation. The framework includes three model variants with varying complexity: a rigid body model with point-on-surface constraints, a rigid body model with mesh geometry constraints, and a hybrid model combining rigid dynamics with finite element methods. Model customization is facilitated through JSON configuration files, requiring minimal programming expertise. The framework was evaluated using experimental kinematic data from a single participant, with muscle excitations computed via PID controllers tuned through global optimization. The models successfully reproduced jaw movements without prior individualization, demonstrating their suitability for prototyping and studying exoskeleton behavior. The basic models are ideal for rapid prototyping, while the hybrid model provides insights into the effects of exoskeletons on the masticatory system. This framework establishes a foundation for advancing jaw exoskeleton development, with future work focusing on patient-specific modeling, improved anatomical detail, and tools for exoskeleton control and design. The framework code is publicly available and can be found at https://github.com/paulotto/exosim.
@inproceedings{Mueller2025a, author = {Müller, Paul-Otto and {von Stryk}, Oskar}, title = {The Foundation for Developing an Exoskeleton for the Rehabilitation of Temporomandibular Disorders}, booktitle = {2025 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), Palermo, Italy}, year = {2025}, pages = {1--6}, month = apr, publisher = {IEEE}, doi = {10.1109/simpar62925.2025.10979121}, }
2023
- Visuotactile Sensors
 CANFnet: High-Resolution Pixelwise Contact Area and Normal Force Estimation for Visuotactile Sensors Using Neural NetworksIn Embracing Contacts-Workshop at ICRA 2023, London, UK, Apr 2023
CANFnet: High-Resolution Pixelwise Contact Area and Normal Force Estimation for Visuotactile Sensors Using Neural NetworksIn Embracing Contacts-Workshop at ICRA 2023, London, UK, Apr 2023Visuotactile sensors are gaining momentum in robotics because they provide high-resolution contact measurements at a fraction of the price of conventional force/torque sensors. It is, however, not straightforward to extract useful signals from their raw camera stream, which captures the deformation of an elastic surface upon contact. To utilize visuotactile sensors more effectively, powerful approaches are required, capable of extracting meaningful contact-related representations. This paper proposes a neural network architecture called CANFnet that provides a high-resolution pixelwise estimation of the contact area and normal force given the raw sensor images. The CANFnet is trained on a labeled experimental dataset collected using a conventional force/torque sensor, thereby circumventing material identification and complex modeling for label generation. We test CANFnet using GelSight Mini sensors and showcase its performance on real-time force control and marble rolling tasks. We are also able to report generalization of the CANFnets across different sensors of the same type. Thus, the trained CANFnet provides a plug-and-play solution for pixelwise contact area and normal force estimation for visuotactile sensors. The models, dataset, and additional information are open-source at https://sites.google.com/view/canfnet.
@inproceedings{funk_canfnet, author = {Funk, Niklas and Müller, Paul-Otto and Belousov, Boris and Savchenko, Anton and Findeisen, Rolf and Peters, Jan}, title = {CANFnet: High-Resolution Pixelwise Contact Area and Normal Force Estimation for Visuotactile Sensors Using Neural Networks}, booktitle = {Embracing Contacts-Workshop at ICRA 2023, London, UK}, year = {2023}, url = {https://openreview.net/forum?id=dUO0QQw4FW}, }